Current Projects
Current Projects | Past Projects | Videos
Current

By 2050, the US population is estimated to grow to 400 million and the world population to 9.7 billion. Current agricultural practices account for 70% of global water use, energy accounts for one of the largest costs on a farm, and inefficient use of agrochemicals is altering Earth’s ecosystems. With finite arable land, water, and energy resources, ensuring food, energy, and water security will require new technologies to improve the efficiency of food production, create sustainable approaches to supply energy, and prevent water scarcity.
An Engineering Research Center on the Internet of Things for Precision Agriculture (IoT4Ag) has recently been established to ensure food, energy, and water security by advancing technology to increase crop production, while minimizing the use of energy and water resources and the impact of agricultural practices on the environment. The center will create novel, integrated systems that capture the microclimate and spatially, temporally, and compositionally map heterogeneous stresses for early detection and intervention to better outcomes in agricultural crop production. The Center will create internet of things (IoT) technologies to optimize practices for every plant; from sensors, robotics, and energy and communication devices to data-driven models constrained by plant physiology, soil, weather, management practices, and socio-economics.
MSRAL researchers are working on the design and control of teams of UAVs and UGVs for agricultural mapping, sensing, and physical interventions.
Recent advances in the design and fabrication of microrobots has made them increasingly viable for biomedical applications. Due to their small size, microrobots have the potential to access many areas of the body with minimally invasive strategies. They can be wirelessly controlled and steered toward target locations within the body to perform a myriad of tasks. Compared to conventional surgical and drug administration techniques, the use of actively guided microrobots have promise to reduce patient trauma, lower the risk of side effects, and have higher drug retention rates. In this project, we are investigating microscale tumbling magnetic microrobots for various biomedical environments. We use a novel two-degree-of-freedom rotating permanent magnet system as the source of the time-varying external magnetic field for wireless control and propulsion and with high-frequency ultrasound imaging for in vivo applications.
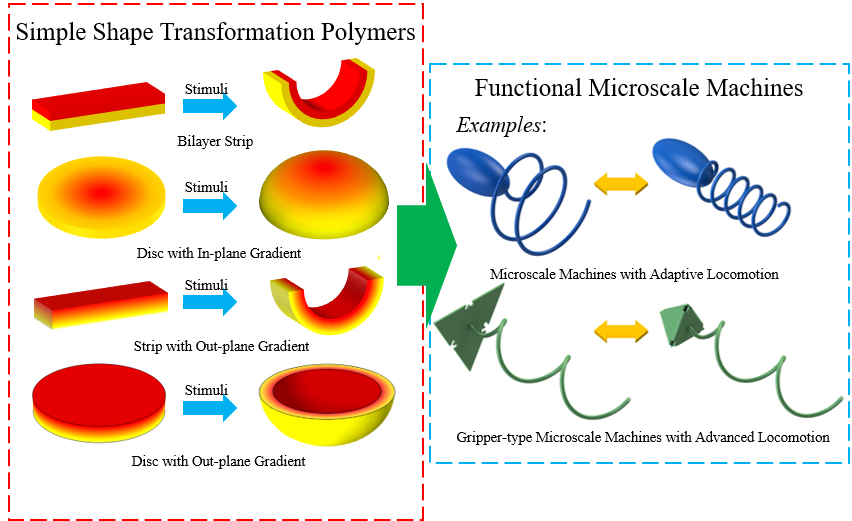
This project will create a new class of responsive polymer magnetic microrobots (RPMMs) with active components and sensing capabilities. An embedded magnetic body will enable the use of external magnetic fields to control microrobots to navigate in the workspace. The active components will be made from responsive polymers and actuated by external or environmental stimuli. The polymer structures will be calibrated so vision-based force-sensing techniques can be applied. Additionally, properties will be embedded into microrobots for environmental sensing.

Purdue University’s Resilient Extra Terrestrial Habitats (RETH) Institute is developing the smart technologies humanity will need to inhabit the Moon and, perhaps someday, Mars.
The RETH Institute has three main research pillars:
System Resilience: developing the techniques needed to establish a control-theoretic paradigm for resilience, and the computational capabilities needed to capture complex behaviors and perform trade studies to weigh different choices regarding habitat architecture and onboard decisions.
Situational Awareness: developing and validating generic, robust, and scalable methods for detection and diagnosis of anticipated and unanticipated faults that incorporates an automated active learning framework with robots- and humans-in-the-loop.
Robotic Maintenance: developing and demonstrating the technologies needed to realize teams of independent autonomous robots, incorporating the use of soft materials, that navigate through dynamic environments, use a variety of modular sensors and end-effectors for specific needs, and perform tasks such as collaboratively replacing damaged structural elements using deployable modular hardware.
MSRAL researchers are leading the work in the Robotics thrust in regards to mobile manipulation, modular end-effector development, and manipulation in constrained spaces.

This project is on the creation of a novel class of magnetically-controlled, mobile microrobots with two-dimensional vision-based micro-force sensing end-effectors. By combining advanced mobile manipulation microrobots with a MEMS-based micro-force sensor, a novel, transformative tool for future advancements in mechanobiology and automated biomanipulation will result. The end-effectors of the mobile microbots consist of micro-compliant mechanisms with custom-designed force-deflection characteristics whose deformations are observed with a camera attached to an optical microscope. They are fabricated along with a magnetic microrobot body and are therefore controllable with external magnetic field gradients. These micro-force sensing mobile microrobots will have real-time micro-force-control manipulation capabilities specifically tailored for mechanobiology and automated biomanipulation tasks. A portable Bio-Robotics test-bed, designed to fit comfortably around both inverted optical or confocal microscopes is also under development. A series of proof-of-concept application studies related to single cell and biomaterial adhesion and cell characterization are planned to showcase the efficacy of the system.
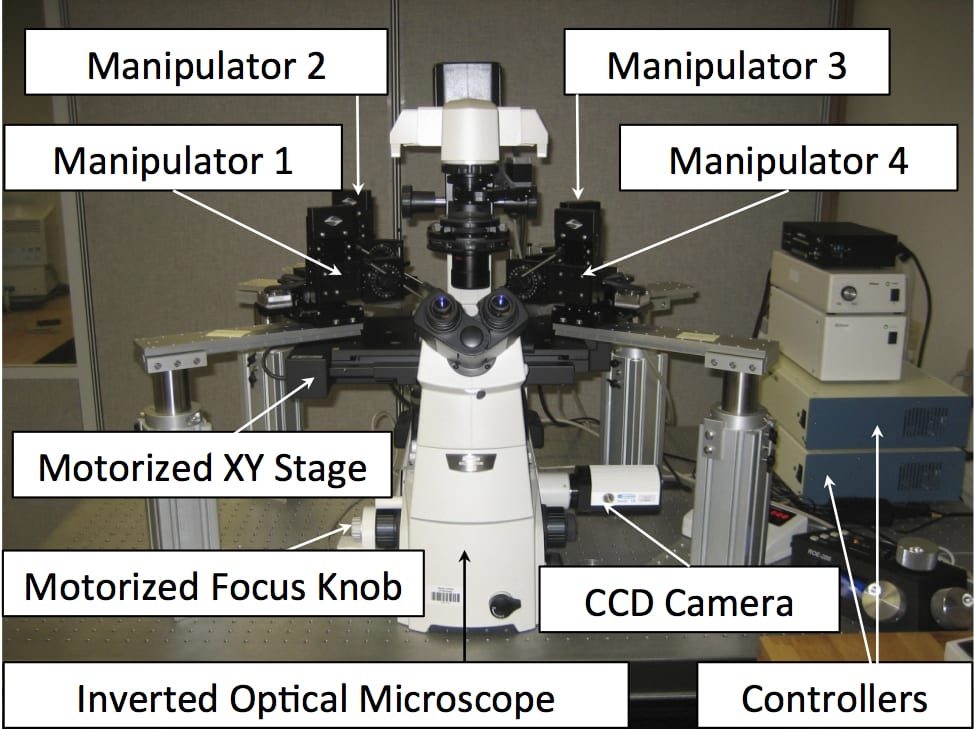
Micro- and meso-scale automation is a popular research topic today, coinciding with trends to manufacture smaller and cheaper products at faster rates. Some microassembly cells presented in the literature utilize multiple manipulators but they are generally each used for individual operations and do not cooperate to manipulate the same part at the same time and/or use specialized micro-snap fasteners, parts, and substrates. We are interested in designing more flexible micro-scale manipulation and assembly systems than these. Indeed, it may not be desired or even feasible to always to be able to design parts with the requisite features for micro-snap fastening, or with the necessary foldable joints. Therefore, rather than utilizing micro-grippers or relying on specialized part features or assembly substrates to realize 2D and 3D micromanipulation and assembly tasks, we are developing a flexible system consisting of coordinated movements of multiple (2 to 4) micromanipulators with simple point probe-type end-effectors, allowing for a full or over-actuated system capable of executing sophisticated manipulation primitives, such as micro-scale caging operations.

We are developing a micro-robotic device for use in minimally invasive lumbar microdiscectomy procedures. This surgical procedure greatly improves the patient’s quality of life by removing herniated lumbar disc material that causes strain on the branching nerves of the spinal cord, resulting in lower back pain and sometimes even loss of feeling in one’s extremities. Currently, the only instruments available to remove herniated disc material consist of rigid probes with tips that manipulate and remove the patient’s tissue. The inability to freely move within the restricted surgical workspace of the spine, which in some cases can be as small as a cubic centimeter, increases the risk of inadvertent damage of the spinal nerves, as well as other potential risks that can leave the patient paralyzed or requiring further surgery. We are working with an orthopedic surgeon to come up with a system of flexible micro-robotic manipulators, end-effectors, and other minimally invasive tools specifically for the lumbar microdiscectomy procedure.