Responsive Polymer Magnetic Microrobots (RPMMs)
Responsive Polymer Magnetic Microrobots (RPMMs)
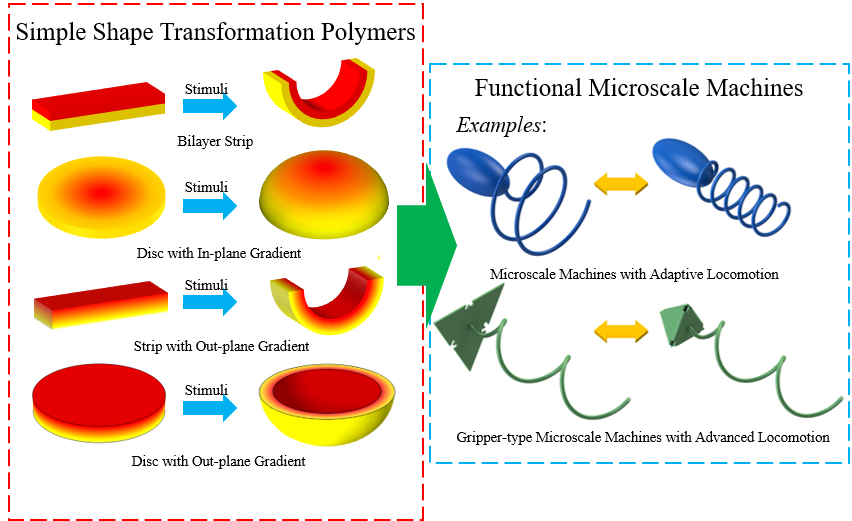
This project will create a new class of responsive polymer magnetic microrobots (RPMMs) with active components and sensing capabilities. An embedded magnetic body will enable the use of external magnetic fields to control microrobots to navigate in the workspace. The active components will be made from responsive polymers and actuated by external or environmental stimuli. The polymer structures will be calibrated so vision-based force-sensing techniques can be applied. Additionally, properties will be embedded into microrobots for environmental sensing.