Multi-Scale Manipulation, Automation, and Assembly
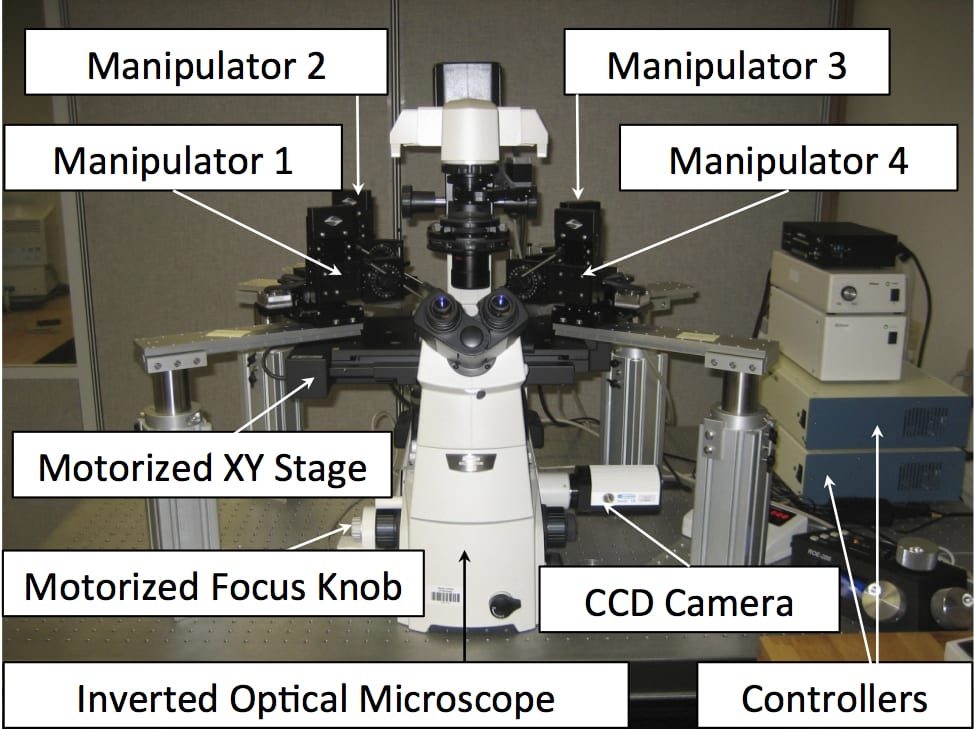
Micro- and meso-scale automation is a popular research topic today, coinciding with trends to manufacture smaller and cheaper products at faster rates. Some microassembly cells presented in the literature utilize multiple manipulators but they are generally each used for individual operations and do not cooperate to manipulate the same part at the same time and/or use specialized micro-snap fasteners, parts, and substrates. We are interested in designing more flexible micro-scale manipulation and assembly systems than these. Indeed, it may not be desired or even feasible to always to be able to design parts with the requisite features for micro-snap fastening, or with the necessary foldable joints. Therefore, rather than utilizing micro-grippers or relying on specialized part features or assembly substrates to realize 2D and 3D micromanipulation and assembly tasks, we are developing a flexible system consisting of coordinated movements of multiple (2 to 4) micromanipulators with simple point probe-type end-effectors, allowing for a full or over-actuated system capable of executing sophisticated manipulation primitives, such as micro-scale caging operations.